Enginerding: What Is Anti-Squat & How Does It Actually Affect Mountain Bike Performance?

Words: Dan Roberts
Illustrations: Taj Mihelich
Anti-squat has become common term in discussions about bike design. But what does it mean? As simply as possible, it’s how your bike’s suspension reacts when you accelerate. Although there are other factors at play as well, anti-squat most often gets oversimplified to pedalling performance. While it's a big factor there, we need to start off with some other terms and build our understanding to properly understand its effects on bikes.
Riding bikes is a hugely dynamic process, so to analyse what’s going on we need to strip real life back to two dimensions. That way we can understand what is happening and make some calculations before we start to, bit by bit, add in real world elements and scenarios to arrive back at real life with an analysis that matches it as closely as possible.
First, we start with some definitions of mass and weight. As a rider we have a certain mass, measured in kg. As most of us live on Earth, we are subject to gravity accelerating our mass towards the center of the Earth. This accelerating of our mass exerts a force on the ground where we contact it. This is our weight, measured in Newtons.
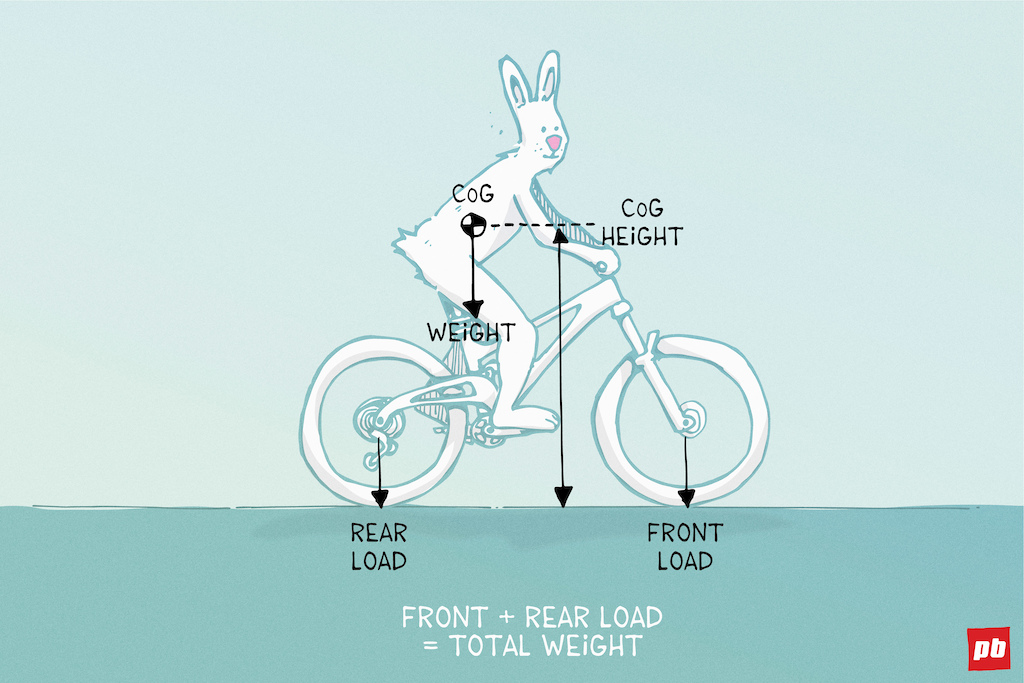
The mass of the rider and bike is accelerating towards the center of the Earth creating the weight force. This is then split between the two contact patches creating a load at each. There is an equal and opposite reaction force pushing back up against this downwards load.
For the analysis of anti-squat, we need to use our center of gravity. Every particle of the bike and rider is being attracted to the center of the Earth due to gravity, but to simplify it for calculation we concentrate all these forces to one singular point; the center of gravity or CoG. As a bike can’t ride itself and it is similarly not as much fun to run down a trail the center of gravity needs to be that of the bike and rider combined.
This combined weight of the rider and bike creates a load acting at the ground that is split between the two contact patches. Neither acceleration nor braking can cause our actual weight to transfer. During acceleration or deceleration, it’s a load transfer that happens. Our weight can remain in a constant position while the load is transferring underneath us.

The CoG of a giraffe demands a completely different suspension design to allow it to have an efficient pedalling bike, amongst other considerations.
When you accelerate the amount of load transferred to the rear contact patch must be balanced with a reduction in load at the front. The weight always remains the same, just that if you somehow manage to wheelie your bike, all the weight is being supported by the rear contact patch.
In mountain biking the magnitude of this load transfer isn’t to the same degree as in cars or motorbikes. We simply can’t achieve the same acceleration forces, no matter how big your thighs are. However, it’s still hugely important in the system.
This load transfer happens in all bikes, no matter if you have suspension or not. But it’s with the inclusion of suspension, especially rear suspension, that we encounter its tangible effects.

With constant acceleration of the bike and rider forwards the CoG of the system is accelerated in the opposite direction and creates a moment due to the CoG height above the ground. This moment causes an increase in load at the rear accompanied by a decrease in load at the front. The weight has remained in the same place the whole time, but the load has transferred.
Under constant acceleration, the load is transferred to the rear contact patch, and in turn load is reduced at the front contact patch. This acceleration causes a rearward rotation of the bikes sprung mass and un-attended to will cause the front suspension to rise and the rear to squat.
Anti-squat therefore seeks to counter this suspension compression from load transfer. It is simply an expression of how the suspension responds to driving forces, and is expressed as a percentage.
To illustrate anti-squat and make sense of these percentages we can draw the graphical method for calculating anti-squat.
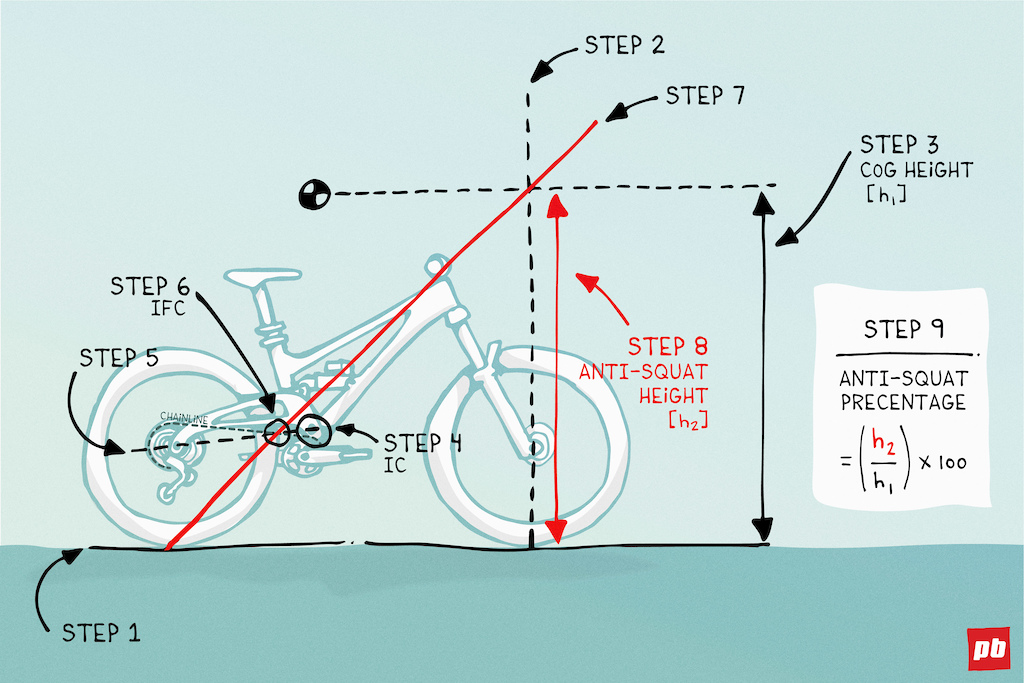
Step 1: Draw in the ground between the two contact patches.
Step 2: Draw a line up from the front contact patch through the front axle, perpendicular to the ground.
Step 3: Determine the CoG position and get a measurement for its height above the ground.
Step 4: Find the instant center of your bike.
Step 5: Draw a line from your rear axle to your IC.
Step 6: Where this line and the line of your chain cross is called the instantaneous force center or IFC.
Step 7: Draw a line from your rear contact patch through this IFC and cross over the front contact patch line. This is called the anti-squat force line.
Step 8: Measure the height, from the ground, that this line crosses the front contact patch line.
Step 9: Compare this measurement to the CoG height measurement in terms of a percentage.
Step 2: Draw a line up from the front contact patch through the front axle, perpendicular to the ground.
Step 3: Determine the CoG position and get a measurement for its height above the ground.
Step 4: Find the instant center of your bike.
Step 5: Draw a line from your rear axle to your IC.
Step 6: Where this line and the line of your chain cross is called the instantaneous force center or IFC.
Step 7: Draw a line from your rear contact patch through this IFC and cross over the front contact patch line. This is called the anti-squat force line.
Step 8: Measure the height, from the ground, that this line crosses the front contact patch line.
Step 9: Compare this measurement to the CoG height measurement in terms of a percentage.
Seeing as the load transfer is trying to rotate the sprung mass of the bike and rider, if your anti-squat percentage is 100% then the anti-squat forces exactly balance out the tendency of the suspension to squat under the load transfer from acceleration and the net result is that there is no suspension compression or extension.
If the anti-squat force line crosses the front axle line at the ground, we can call this 0%, as none of the tendency to squat is counteracted and the suspension compresses solely due to the load transfer.
Crossing the front contact patch line half way between 100% and 0% results in 50% anti-squat and half of the force needed to combat the squat tendencies is combatted. The net result being some suspension compression, but not as much as if we had 0%.
Going under 0% the anti-squat forces actually work with the suspension compression caused by load transfer and put us in a pro-squat zone. In this region the suspension will compress further than at 0% with the help of the pro-squat forces.
Above our 100% mark, where we’ve effectively separated the drive forces from the suspension response, the anti-squat forces will actually be more than enough to combat the squat tendencies, and the rear suspension will extend with that excess force.

The percentage of anti-squat is all in relation to the CoG. If the anti-squat force line and the CoG cross the front axle at the same height it's 100%. If the anti-squat force line crosses at the ground, it's 0%. You can then go below or above these limits with negative percentage values or above 100% values respectively.
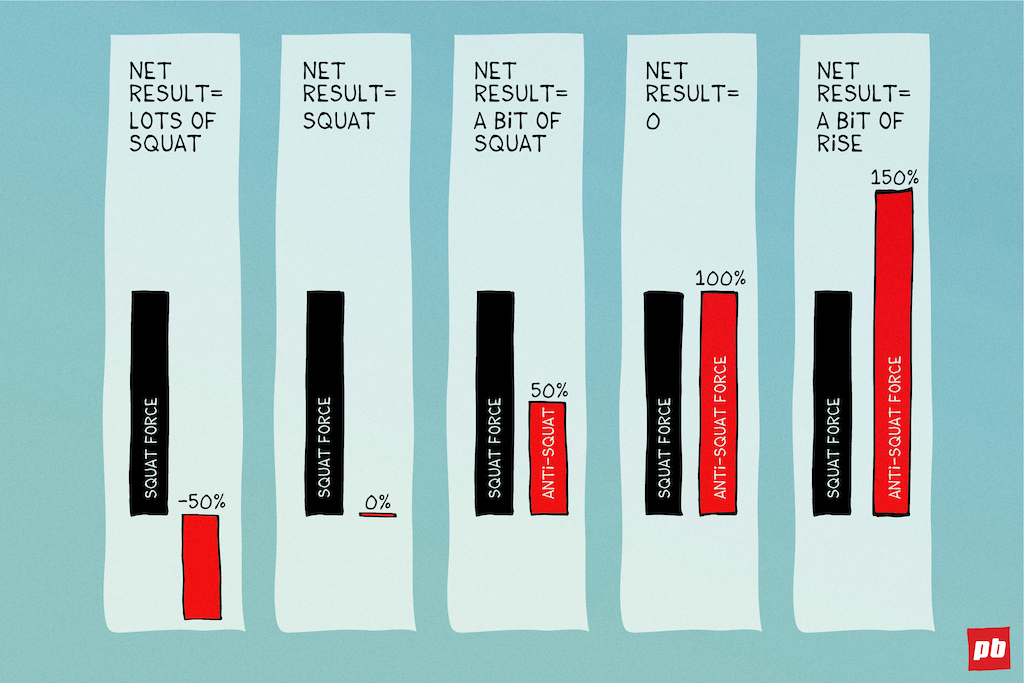
The percentage of anti-squat tells us how much of the squat force, caused by the load transfer from acceleration, is counteracted. 100% means the two forces are equal and the net result is no suspension compression. 0% on the other hand, means none of the squat force is counteracted and the net result is the suspension compresses.
Anti-squat isn’t a fixed figure for a bike, it changes as the bike goes through its suspension travel. What we can do is draw out the graphical calculation at incremental steps in the travel until we have a curve that shows us what’s going on from zero to full travel.

Calculating the anti-squat percentage for multiple steps in the travel of the bike gives us an anti-squat curve. You can then see how the anti-squat changes as a function of rear wheel travel. Some anti-squat curves are a straight line, others have far more curvature to them.
When you pedal a bike, you’re investing energy in the system to move you forwards. Some of that energy will always be transferred to somewhere that isn’t going to help the forwards movement, like friction in your drivetrain. But ideally, you’d want as much of that effort you put in to be getting you up the hill. A system that doesn’t combat any of the squat from the load transfer is going to result in unwanted suspension compression and you bobbing your way up a climb.
Anti-squat is a good thing then, to combat the natural want of the bike to squat and compress the suspension. While the acceleration of your bike might not change with or without anti-squat, if you have some combating then you’re more likely to keep your CoG in a constant position, maintain a more favourable bike geometry and keep the load at your rear contact patch at a more constant level.
With anti-squat being good, too much of a good thing can be bad. The anti-squat needs to be within a good range and applicable to the bike’s intentions. Designers can adjust the anti-squat with pivot locations, changes in the geometry, wheel size and chain line.
The chain plays a big role in anti-squat, beginning with its duty to transfer the driving forces from the mainframe to the rear wheel. It’s from these driving forces that the whole load transfer story starts. However, a common misconception is that anti-squat is the chain force and nothing else. It’s in the combination of the chain line with the suspension pivot layout that we get our anti-squat force line. While the suspension layout can remain static, we can actually move from an anti-squat case to a pro-squat case just by changing the gears and so changing the chain line. So, the chain’s effect in the anti-squat calculation is in addition to the inherent anti-squat properties of the linkage system. The chain can then either add, do nothing or work against the anti-squat of the linkage system. There's also more ways than one to accelerate a bike.
Looking at high pivot bikes with idler pulleys we can see that they have anti-squat percentages often over 100%. This is despite there being only a small proportion of the anti-squat forces coming from the chain line, which is often positioned close to or directly through the main pivot. That means it’s then the pivot location which is providing the high value of anti-squat, the location of the pivot dragging up the anti-squat force line.
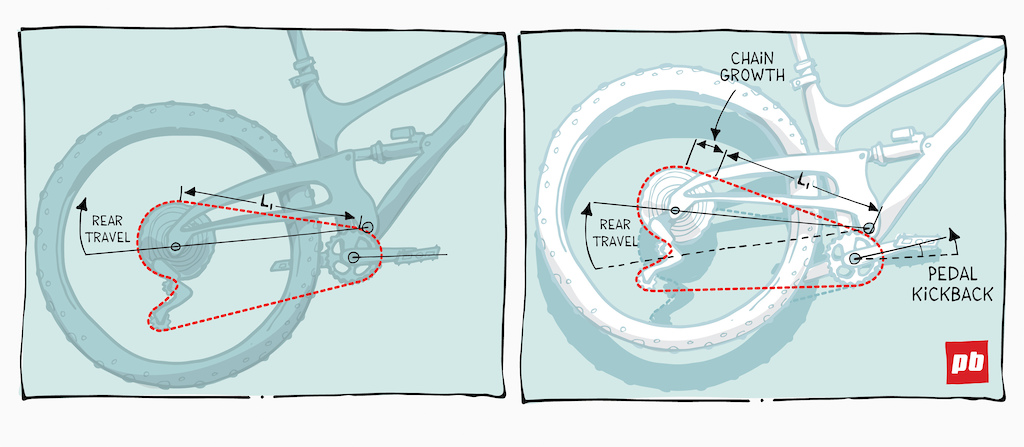
Pedal kick back is caused from the growth of the chain as you go through your travel. Some bikes have more and some less, but generally as a bike has more anti-squat it will exhibit more pedal kick back. Pedal kick back might actually never be felt at the pedals, as this chain extension can result in a rotation at the rear wheel.
It’s also with the chain that we find one of the potential downsides of anti-squat. The amount of anti-squat is followed closely by the amount of pedal kickback for most suspension designs. The aforementioned high pivot idler pulley designs being an exception. As the suspension moves through its travel the distance between the rear axle and the chainring increases. The top portion of the chain then needs to compensate for this change in distance and causes a rotation at the cranks or a rotation at the rear wheel. It may even do nothing at all if the angular velocity of the rear wheel is higher than the angular velocity of the cassette and freehub when the chain extension gives it a good tug. Pedal kickback gets measured as an amount in degrees and its magnitude increases or decreases as the amount of anti-squat increases or decreases.
Pedal kickback is a whole other topic, with research already done into its relevance, how much is acceptable and in what scenarios the theoretical degree of motion of the cranks will actually happen. But as mentioned, the anti-squat works best in a reasonable window when it doesn’t stray into extremes and if that is the case then the amount of pedal kickback will also not enter into an extreme amount.
Now that we understand what anti-squat is, how we calculate it and what its percentages mean, we can add in more and more pieces to bring the analysis back to real life and start to consider how we can really use anti-squat.
With the anti-squat calculation only considering forces and moments from the load transfer due to acceleration we could perceive that 100% is the amount to aim for to combat all the squat tendencies. However, in real life we have more loads trying to compress the suspension than just that from the load transfer.

The stripped back nature of the anti-squat calculation only looks at the effects of load transfer. In reality there are many more forces acting to compress the suspension when we pedal or accelerate. When you push on the pedals some of that force is going to want to directly compress the suspension, so maybe it's good to counteract that too, as well as the squat from load transfer.
Even if you remain rigidly still while pedalling your CoG will want to rise up as you push down on the pedal. This acceleration of the CoG upwards is balanced by a downwards force on the bike, which will want to compress the suspension. So, pedalling a bike with that ideal 100% anti-squat figure will still result in the suspension compressing. Raising the anti-squat percentage above 100% means that we extend the suspension slightly with the extra anti-squat force. This extra extension can be used to counteract that extra vertical load put on the bike while pedalling. There is again a limit to how much extra anti-squat force we generate.
With pedalling being a cyclical motion, and the resulting power delivery following that cyclical behaviour, it can mean that we momentarily add or reduce the load on the tyres which in turn affects the amount of grip that we have. If we have a system with very high anti-squat percentages the extension of the bike will cause our CoG to rise with each pedal stroke. This rising CoG is joined by an increase in load at the contact patches, in addition to the already increased load at the rear contact patch due to the load transfer. In between pedal strokes the load transfer is reduced, so too is the load at the rear contact patch. In addition, the suspension will attempt to return to its equilibrium position and further reduce the load at the rear contact patch. This cyclical increase and decrease in load at the rear tyre can cause issues with traction.
Coming back to the amount of acceleration that a human can achieve on a bike, ebikes have upped that acceleration amount. For anyone that has ridden one they will know the hugely increased sense of gathering speed. This up in the amount of acceleration also ups the amount of load transfer and can make it happen in a shorter time. While the power delivery might be smoother on an ebike compared to a non ebike, the detrimental effects of the load transfer are more profound and tyre loading and unloading can be more severe. Added to this the system’s CoG is in a different place with the addition of the battery and motor. So perhaps on ebikes more than any the design of the anti-squat is of high importance to ensure an efficiently powered bike with good traction.


The CoG position of a rider can change horizontally, meaning the 100% anti-squat limit would remain the same. But the changes in load at the front and rear tyres from this shift in CoG could result in the effects of the load transfer and anti-squat forces being more or less prevalent.
Once we add more and more real-world factors into the anti-squat equation, we can start to see why it becomes difficult to design bikes. Once we start to see also the influence in CoG position that rider size, riding position (pedalling seated or pedalling stood up), terrain (riding on flat ground or riding up a steep hill) and the fact that a mountain bike rider is a wildly moving quarter horse power engine during even the least rowdiest rides we can start to see why we needed to strip the analysis back to a more simple beginning and add in some assumptions.
With current analyses made visible to the public, and without a lack of a standard set of rules for each manufacturer to abide by when analysing anti-squat, there are quite a few assumptions that need to be stated and understood.
Most of the time the CoG height is fixed, and no consideration taken into its varying position with rider height and seated or stood pedalling. The analysis is also conducted on flat ground, where the distribution in load between the two contact patches is closer to equal. If we were to tilt the bike uphill we would naturally start the analysis with a higher proportion of the load on the rear contact patch and any bikes that would squat with the load transfer would come dangerously close or completely remove any load on the front and cause the bike to start to loop out. For our analysis in 2D we also consider the bike to be perfectly vertical.

When climbing a steep hill our weight is acting in a different direction to when we are on the flat. Firstly, there is a component of our weight pulling us back down the hill and as the total needs to remain the same it means we have reduced overall load at the tyres. Our load distribution between the tyres is different too, with more load on the rear and much less on the front. If in this situation your bike has a tendency to squat then it won't take much acceleration for the effects of the squat to remove all the load at the front contact patch and you're left with zero traction.

Riders of different sizes will have different CoG heights and so the 100% anti-squat line will be different. It then makes sense, in an ideal world, to adapt the suspension of each size of bike to the size of rider that will be on it. A larger rider would need the anti-squat force line to cross the front axle higher up to achieve the same amount of anti-squat. It does however increase the number of variables in manufacturing a bike, but some brands do it.
As we compress the suspension to analyse the anti-squat throughout the full range of travel, we must also consider what the front suspension is doing. To keep things simpler, we can say that the fork stays extended. This will generate an anti-squat graph using lines to describe what’s going on. We could add in a degree more complexity and compress the front suspension in time with the rear, allowing the front and rear to arrive at full travel at the same time. This too would generate an anti-squat line for us to interpret. What we can also do is to analyse the anti-squat at the two extremes of zero front travel and full travel and plot two lines on the graph which would define a window of anti-squat that we would be working in. All three methods can be done, but the assumption of which one should be stated in the analysis.
We can further increase either the number of curves or windows on our graph by accounting for multiple chain lines. On most mountain bikes we have a varying chain line even with a fixed chain ring size.
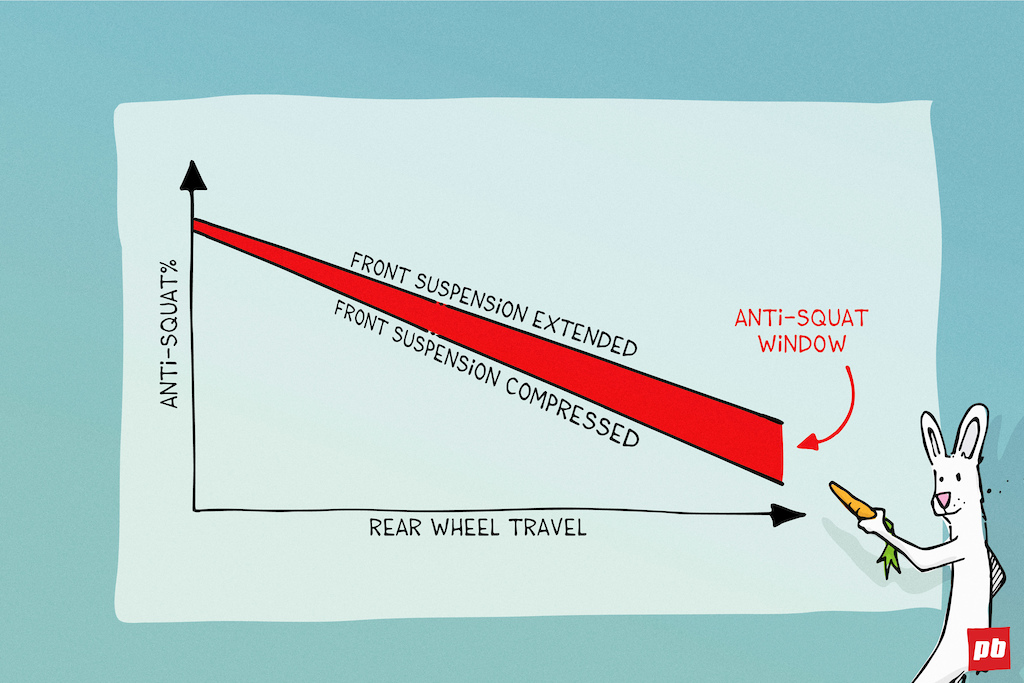
A single anti-squat curve also depends on the position of the front wheel. If we draw anti-squat curves, one for zero front wheel travel and one for full travel then we generate an anti-squat window that our bike will operate in. But it can't just be taken at face value. The real world situations need to be considered again, as you'd rarely be pedalling your bike with the fork bottom out.
Analysing anti-squat needs us to simplify reality to understand how we’re combating the tendency of our suspension to squat with load transfer. Hopefully the article has gone some way to explaining how we do that. But hopefully more, our re-insertion of that analysis back into the real world and the additions of other loads, situations and considerations helps give some further understanding and food for thought into analysing our bikes.
Author Info:

 Member since Apr 6, 2019
Member since Apr 6, 2019
Must Read This Week
Sign Up for the Pinkbike Newsletter - All the Biggest, Most Interesting Stories in your Inbox
PB Newsletter Signup
I’m also 6’3”, and this makes it really clear why a single suspension design, STA and chain stay length across all sizes of a given frame will behave totally differently for different riders. Let’s home more brands start varying these numbers with size, Norco-style!
little less nerdy
The present article is brilliantly clear despite being very detailed and very technical. Thanks Dan. Looking forward to the anti-dive article as this is a little less clear to me.
I remember an editor who kept saying that VPP’s drawback is that the leverage curve can only be regressive-progressive. Not only it’s not the case for all Santa Cruz bikes now, but it was already the case for the V10.
There’s enough wrong statements made in the industry (and repeated by many) that’s why I disliked this simplified article as it may fuel this trend on a few points. Can’t remember all of them.
I tried telling her that the forks on my current ride aren't slack enough. She told me I was slack enough to make up for it...how do I come back from that?
You wouldn't want anyone to get hurt out in the chunder, right?
the calculator: tinyurl.com/v52e4rb
I always use the BB as a ref, not the floor
I'm just sorry I don't know English very well. Translate the article into Italian, here bikers need fun! we are all at home
The right suspension setting remains essential!
How much is acceptable? This is a very good question!!! Do you try to ride without pedal kickback?
We think that pedal kickback is a big enemy of riding.
There is a true miseducation around bike suspension kinematic.
Too much long-travel bikes are designed with huge AS/PK value to feel firm at pedalling in parking lot test but are a shame from suspension efficiency point of view. And PK values are never displayed, even in Dan Roberts article.
Bike will pedal well (high AS/PK values) OR have an "active" (i.e. working) suspension (low AS/PK).
There isn't any bike that can pedal well and have a true working suspension kinematic unless you switch a lever on the shock, until they got an ideler pulley that cancel chain growth.
High AS values with zero chain growth
Pedalling efficiency of the rider is a huge factor too. Someone who can pedal smoothly at 100rpm without actuating the suspension would have no issue with a 50% AS bike and can gain in suspension sensitivity. A guy who mashes out the saddle at 70rpm needs 120% or it “doesn’t pedal well bro”.
Ride chainless is different
When coasting:
On low kickback bikes (kickback is closely linked to anti-squat), it's impossible. Your bike and your legs would break from the severity of the impact before kickback occurs.
On very high kickback bikes with high engagement hubs, it may be possible on severe impacts in the outermost sprockets; still have to work out how severe (probably not very) and how frequent (probably not very) it's likely to be.
On typical bikes with typical hubs, if it occurs at all, my current thinking is it's so minor and so infrequent as to not really be a thing. I'll discuss it in the forums when I'm more confident in the new way I've set up the equations; for now, it looks like the conditions to produce kickback on a typical bike are so extreme in every parameter that it should be rare and minor - and if it occurs, it's the least of your problems. I'll update when I feel good about the numbers.
It appears you may have neglected to account for the forward motion of the bike. I hope we can discuss this further.
Yes, maybe. I'm 75kg and never thought of the rider weight effects as a sensibility factor, so thanks for that !
I would like to explain the long (empirical) way that makes me conclude that high AS/PK ratio was not compatible with optimal suspension operation i.e maintaining traction (tire contact with ground) and damping shocks - and nothing else.
All the bikes you're referring to have pretty high AS/PK, this can explain that you didn't felt a big difference with the Rallon.
Particularly the Norco sight and range (particularly the 650b first gen) got way more AS/PK than your Rallon and in a lesser way, the Evils.
I owned a lot of these bikes from 2013 : split pivots (Devinci Troy, Trek Slash), 4-bar ( Norco range and sight 650b 1st gen - still own the sight in 3x setup), sliding monopivot ( yeti SB5C). All of these are in the same window for PK, i.e. 22-27° at full travel in 32-46, with pretty linear PK ratio (i.e. PK growing constantly along travel), except the yeti at the end of travel.
I didn't ride bike parks or groomed trail, mostly surrounding natural trails in Quebec then south of France with lots of stones and roots, and (to my regret) few flowy sections. I mostly grin the upper section of my cassette, didn't go frequently below 18 (32 tooth ring).
Most of bikes I rode used the ubiquitous 210*51-57 "legacy" shocks, and most of these bikes got a progressive suspension ratio (which exception to the yeti), and I always swapped the manufacturer shock to high-end 4-ways shocks, CCDBA or Fox X2 circa 2015, with standard to light compression tune and always ride with compression almost fully open.
On all of these bikes, given my riding trails and bike setups, I ever felt a strong feedback (like a hardtail feeling) on small bump/square edges/stairs-likes steps, and a very bad traction on loose terrain, be it climb or downhill.
Something that lasted for almost 5 years, that makes me thought that my suspension wasn't optimally working, or something was wrong with my setup. I was constantly looking for improvement, so my multiple bikes swapping.
I finally went to the nerd thing, bought the Linkage software and start to compare sus kimematics curves. I'm not a mechanical engineer by any mean but got a PhD in fluid mechanic, so not completely dumb with figures and physical theory. I ended isolating the 2 constants of all the bikes sus kinematics I rode: high AS/PK figures and progressive ratio.
So to test my theory I looked for and bought a bike with low AS/PK and almost linear ratio with the simplest linkage : a 1st gen monopivot Kona Process 134 - I acknowledge that it was not a very rational methodology since I needed to isolate each one of the variables I would to test for sensibility, instead of having to discriminate the effects of both variables.
But it gives good results and that was the first time I can said that my suspension was actually working. Bike got a lot of traction, no foot feedback and a sensation that defined what small bump compliance should be. But it blow through it travel. Constantly. Despite numerous shock swap and fine tuning. So I made the assumption that it was the effect of the very linear ratio in a context of low chain growth/minimum transmission-suspension interactions.
So I finally looked for a bike with low AS/PK and a progressive ratio with constant progression to isolate hydraulic effects. To my knowledge there was very few of this kind, in 2017 there was almost only one brand doing this kind of stuff: Knolly.
I bought a Warden, swapped the DBIL for my long lasting 2015 X2 and it worked just fine. This setup had a huge small bump compliance, traction is first-class and the bike that didn't blow through its travel at the first bump…
So I concluded that low AS/PK and progressive ratio was the way to go given my usual trails, habits, age, and now, weight.
Sorry for the long story.
Side note - it was rarely written but some of the 2013-2017 bikes suffers a lot in term of AS/PK going from 2x - 3x setups (for which they were designed - Norcos, Yeti SB 1st gen) to 1x setup since bigger plates minimize PK. Having more than one plate give designers one more freedom degree in designing full sus kinematics.
Damper properties, axle path, tire size and pressure, spring curve, leverage curve ... many variables need to be considered before kickback can be isolated as the cause of what a rider feels through his or her feet. Modeling of kickback shows that only some bikes will ever experience it, only in some sprockets, and only sometimes. Only a small number of bikes will experience it frequently with certain hubs and in certain sprockets, and even then I'm not convinced it's a significant issue. Many bikes will never experience it.
Could it be that riding style also has a significant impact on what a rider feels and how the bike reacts? I tend to be a "hover" type rider where I'm slightly weighted on the seat when I climb this lets me shift my weight around as needed and to be frank, I don't really notice pedal bob on most bikes when climbing. I've noticed that some people stay firmly seated for maximum traction but they tend to complain about pedal bob, even on bikes that are supposedly good pedaling platforms
Pedal bob is not the same as kickback. Bobbing is either excessive squat - or, less likely, rise - due to pedaling forces or a resonance in the suspension due to your pedaling. Kickback is an unwanted change in pedal rate of rotation due to suspension movement. A bike could have a considerable amount of one and a low amount of the other.
Yes, riding style and bike set-up have some effect. If you use less travel than other people over a given terrain, you're less likely to experience kickback.
When pedaling, all bikes with rear suspension are subject to kickback and/or a moving bottom bracket (the latter in the case of GT's i-Drive (etc.) or URT designs). If you haven't noticed kickback while pedaling, it could be that your bikes experience only a small amount, your trails don't cause a great deal of it, or you're mostly unbothered by it.
Kickback while coasting is a different situation that does not affect all bikes, is effectively eliminated in some sprocket combinations, and does not occur often, even on bikes that are prone to it - and if it does occur, it may not be enough to notice or cause any noteworthy effects.
I'm mot a mechanical engineer and I just haven't enough time to dig more theoretically on what I'm feeling.
Most of my observations of "alleged" kickback effects are during pedalling in high gear/low speed or coasting at low/middle speed in middle cassette range.
I'm really picky in sus feeling, on a warden prepared for having very few pivot/bushing friction and an X2 coil, climbing a coarse gravel trail in 32/42 I can tell the difference of 4 click less in low speed compression on traction feeling (4 from full open to close).
I didn't do the enveloppe calculations, but assuming an instantaneous engagement freewheel, is it right to say that if instantaneous chain growth velocity is higher than the instantaneous wheel velocity at the engaged gear radius position (i.e. instantaneous engaged gear velocity), then then upper chain is in tension between ring and gear ?
I was talking about the 1st gen 650b sight and range who used a kinematic layout close to giant NRS, lapierre OST 1st gen, etc... with horst link pivot far below rear wheel axis (chainstay pivot).
The range 650b 1st gen got AS/PK figure really close to the rallon. The range 2017 is not so far, too, in the 22-27° PK range in 32/50@150mm, although PH decrease more in the lower gear than rallon and Range 1st gen.
I cannot share Linkage software graphs but here is the publication of Antonio Osuna's blog.
linkagedesign.blogspot.com/2012/09/norco-range-275-2013.html
From the software:
PK for 32/50@150mm - 32/10@150mm:
- Rallon 2018: 26.79° - 9.04°
- range 650b 2013: 27.75° - 8.82°
- range 29 2017 : 22.98° - 5.19°
When comparing the Range and Rallon, instead of using the same sprocket combinations on each bike, I tried to use the most realistic matches. For example, several models of the Range were spec'd with 2×10 drivetrains, so I used the 36T chainring vs. a 30T on the Rallon. Cassette sprockets were chosen to give the closest possible rollout (distance traveled per crank revolution). Not exact matches, but close. If I use the 30T single chainring spec'd on some models of the 2015 Range, the kickback on the Rallon is very similar to that of the Range. My Linkage model is labeled "model year 2015", corresponding to the model update released either late 2014 or early 2015; I'm unsure how this compares to a prior model, but a quick visual inspection suggests they're similar. In any case, the point is that you said "Particularly the Norco sight and range (particularly the 650b first gen) got way more AS/PK than your Rallon" and I wanted to show this isn't the case. The values are similar between these bikes, with the Rallon sometimes being higher, depending on the sprocket selection. Regardless of the exact configuration, the Norco isn't "way more". This does not discredit your arguments, it's just a point of clarification.
It's reasonable that you would notice the difference from four clicks of low-speed compression.
If your bike took a large impact while coasting at low speeds, this is a scenario that could produce pedal kickback on some bikes. Not a Knolly, though, as they have extremely low kickback.
If I interpret your statement correctly, then yes, your condition for the onset of coasting kickback is correct. You can use various inputs for the portion of the travel used during an impact and the rate of shock compression to determine the actual kickback experienced. This page provides some models for vertical wheel velocity while passing over an obstacle, assuming a rigid tire and static chassis: www.shimrestackor.com/Code/User_Manual/Sections/Suspension_Velocity/suspension-velocity.htm.
You're right, they are similar, I confused myself, no matter sprocket range ;-)
I never rode the Rallon but when I checked its figures without comparing I stayed on the perception that its kickback cannot be higher than that of the 1st gen range (which was huge for me with a 1x 32/11-42 !), which proved to be wrong...
Didn't get that the Rallon had this much PK...
Thanks for sharing your knowledge, I will have a close look at it.
linkagedesign.blogspot.com/2012/12/kickback-en-bajadas-wm.html?m=1
I believe more in a good bike builder!
I ask the question again: Do you try to ride without pedal kickback? (Just remove the chain)
I had a SC vp free, tho, lost of kick back, and an Intense 5.5 (a bit as well), and only felt the pedals pushing my feet when pedaling uphill (hub already engaged). What Osuna says about angular speed of freehub due to kickback vs. angular speed of wheel makes total sense to me. And that guy knows a bit on the subject too
If people want grip they need the most supple and sensitive suspension possible. Removal of friction in all forms is essential. Go watch Bruni’s runs.
or are you being ironic? 0_o
Have you tried a needle bearing DU bush compared to a normal one?
Gwinn ran firm suspension and to keep the geo static but he had to muscle the bike down the hill which worked to a point until some faster, smarter, kids came along and that philosophy runs out of legs pretty quick.
The needle bearing vs bushing is not a valid example, shock mount bushinghs work loaded with hundreds of kg
After all, humans are weak "engines" that don't accelerate with much force relative to the resistance of the suspension with a decent amount of spring resistance and low speed damping.
pretty sure you could measure the affect scientifically or anecdotally of acceleration weight shift induced squat vs pushing pedal downward whilst pedaling induced squat pretty easily. consider how much bob there is when your moving at a constant speed but hammering on the pedals to maintain it, the acceleration is out of play but the lions share of the pedal bob is still happening.
This article mostly glosses over the real nemisis of efficient pedaling on a full suspension " Ol' Pedal Bob" and misleads us to believe it has something more to do with acceleration. Anti squat could be considered the way that it is mostly focused on in this article, but the real culprit to which chain growth is engineered to combat is Pedal Bob
However, even though I agree with you that mashing on the pedals and all of the up and down movement that goes with that has as much (or more) to do with pedal bob, I think the analysis still holds. I just think we would be better served by talking about it in a way that was more "this is how much your pedaling forces will resist pedal bob" sort of way than in a "this is the perfect calculation for exactly how much pedal bob you are going to get" way that most people phrase it.
If you take 70% of the problem away and 20% (pedal bob from leg mass movement) is left, that 20% is now 66% of what is left. And so it is way more obvious.
You haven't mentioned anything about any inherent properties of any linkage system. The only anti-squat formula we've been shown _needs_ the chainline in order to compute the anti-squat.
I mean I also understand that talking about weight transfer without considering the chain is kinda pointless, but still...
A bit simplified; but you can say that the 'linkage-anti-squat' is proportional to the inclination of the line between rear axle and IC (IC higher than axle gives anti-squat, IC lower than axle gives pro-squat), and the 'chain-anti-squat' is proportional to the inclination between the chainline and the line between the rear-axle and IC. (chain-line point down relative to rear-axle/IC-line gives anti-squat, chain-line pointing up relative to rear-axle/IC-line gives pro-squat)
For high-pivot designs, the line between axle and IC is strongly inclined, leading to a high linkage-antisquat.
Usually, for such designs the chainline is (almost) perfectly parallel to the line between axle and IC, then you will effectively have no contribution of the chain force to the anti-squat. This also gives approx. zero chain-growth and thus zero pedal kickback. However, I am also of the opinion that pedal kickback is not really an issue, especially when descending. (and thus coasting)
Things become even more interesting when the idler is mounted to the rear triangle. (like on the Deviate Highlander) Now the 'chainline' that matters for AS is actually the chainline from crank to idler, as that is what will exert a force on the rear triangle that could generate AS.
Does the front center increase in larger sizes cover CoG height change of taller riders adequately?
I believe the bigger prob is the weight distro. On an old school bike like the Remedy 29, while seated, 70% of your bodyweight is on the rear tire on level ground; while standing, only 55% is on the rear. This might sound good, since you want weight on the rear for slip-free propulsion, and weight on the front for wash-out-free cornering, but doesn't this lead to why long travel bikes suck at climbing, since riders are less likely to compromise on DH susp tuning? There's excessive sag on the rear due to so much weight on the back on an incline (even more than 70%), due to tuning rear to be supple out of the saddle. Some brands might opt for a longer CS to improve seated climbing (like on ebikes), but that's known to be detrimental to airtime-worthiness. Some are going even steeper with STA and reducing the difference between sitting and standing. New topic worth covering?
Also its quite a bit more complicated to execute on mechanically.
Why don’t people get that?
It makes a huge difference.
Its not massive for 5mm of change but it starts to add up if you are increase 10-15mm.
Higher average leverage ratio means there's a lot more movement at the axle than at the shock, I thought, moving through spring and damper slower.
Real numbers to show how small it is on a '19 Kona Operator for 15mm CS length change at dropout. 5-10mm extra travel means you feel more travel per bump, and leverage ratio increases from 2.5 to 2.6 (@ 100mm)
You debate how much to care about the difference but it is certainly perceptible on trail.
You want people to pay attention to micro differences, some that they can tune for on the trail, over more meaningful ones that need to be handled at the design stage?
You like short CS, are afraid such bikes will go extinct and just want to BS to deter the idea of longer CS in larger sizes from taking off?
Our body is all over the pace when pedalling on an Enduro or DH race run. We can deal with small changes to suspension behaviour and it's only for such short period of time. But when freewheeling, carrying speed, cornering, we want the bike to remain as neutral as possible.
What's more important: pedalling ability when seated or Body English when descending. I know what I design my bikes for!
It's just anti-rise often gets totally forgotten. Probably because much of the literature is based around motorbikes where indeed the power application is way more important.
Obviously different bike designers can have different views on what is right and wrong, otherwise the world would be very boring! Personally I think neutrality is key. Anti rise (and anti-squat) as close as possible to 100% through the full stroke (or maybe as unchanging as possible noting cofGs vary).
Bikes aren't fast, riders are. Having a bike that is as intuitive as possible for the rider is always going to be the best outcome...
"When we talk about anti-rise, we talk about how the bike will react to mass transfer while braking, and so having the mass shift forwards. This pitching forwards effect would usually have the suspension system extending and having the bike rise out of its travel."
I’m pretty rear suspension design advances preceded the Trust fork, ie DW.
All things considered, a rear suspension built with the express intent to be combined with a Trust fork could make sense.
The only variables I’d like to see tweaked specifically for a Trust fork application is front center and HTA.
I suspect Trust has done this and likely found an optimized application.
But they're not separated above 100%... unless you mean they're separated _exactly_ at 100%... which is not clear in that sentence.
Suspension compression, yes, but bobbing no. Earlier you assumed constant acceleration, in which case any % anti-squat would not cause bobbing.
If you are getting suspension compression only while climbing a hill (n.b. all suspensions compress to a point beyond Sag while climbing hills for the reason mentioned in the article - due to the changed body position of the rider relative to the bike more weight shifts onto the rear wheel) that is because your bike has a good balance between squat and anti-squat or because you have a very well tuned shock. But that doesn't mean the writers comments were incorrect. The writer was referring to bikes with an imbalance of squat and anti-squat. Those bike do bob (assuming no special shock controls) and they bob worse when climbing hills.
”Anti-squat is a good thing then, to combat the natural want of the bike to squat and compress the suspension. *While the acceleration of your bike might not change with or without anti-squat*, if you have some combating then you’re more likely to keep your CoG in a constant position, maintain a more favourable bike geometry and keep the load at your rear contact patch at a more constant level.”
Holy crap, all this time I've been working under the assumption that higher anti-squat values somehow translated into more pedal forces contributing to moving the bike forward, but this seems to be saying it's just making me feel better about the lost energy by minimizing bob?! I'm an idiot!
I am trying to calcultate the AS of a bike single pivot + idler but i higly doubt the standard graphical method can be used.
In case of Idler, I read somewhere that the line through the upper chain line must be replaced by the chainline from the rear spocket to the idler.
Doing like this would lead to weird stuff on the graphical method:
The point of intersection (chainline with idler) / (line from the rear axle to the IC) could be much farther than the vertical line of the front wheel axle (DidlerDrear_spocket). It could also be behind the rear wheel axle if Didler >Drear_spocket. Finally this point does not exists when Didler=Drear_spocket.
What method/calculation would you recommand to determinate the AS of a frame using an idler?
Any chance I get your point of view on this topic ? cheers
In my case the idler is on the front triangle and is concentric to the pivot. That's why I cannot figure out when the diameter of the cassette is very close to the diameter of the idler. It is becoming a strange configuration as the chainline and the line from the rear axle to IC could be parallel and never intersect.
I like linkage but I really want to understand what's behind and not just take the results especially with an idler.
Dan, it should be said, sets the scene very well. Of course there is danger of losing traction at the front wheel while climbing. And, at the moment of the acceleration pulses it is conceivable that the front tyre might lift. And, the experience of suspension bob while riding up hill is certainly disheartening. Just when you are hoping for a bit of acceleration the bike depresses under your pedal stokes and it moves lazily and in a wallowing way up the hill. Your energy is being lost into this bobbing mess with the cyclical compression of the suspension happening just when you put in your most vigorous exertions meant to make the bike pick up some pace. That is truly a terrible riding experience. Personally, I can't stand suspension bob.
Now, despite correctly conveying the terrible riding experience that will be offered by a bike with a tendency to squat when riding up a hill it is misleading to imply that bikes with a tendency to squat are especially prone to traction problems. On the contrary bikes with a tendency to squat may offer better overall traction compared to bikes without that tendency. If we forget about the front wheel for the moment and only consider rear wheel traction it is not hard to see that squat to some extent (despite the poor riding experience it offers) is a useful modality to reduce traction robbing cyclical pressure (down force) variations at the rear contact patch. When climbing on loose or rough surfaces the greater amplitude of the pressure variation at the rear tyre contact patch of a bike with 100% AS or more makes such a bike more prone towards momentary losses of traction with the wheel spinning slightly and intermittently as the rider tries to propel the bike up the hill. Dan is well aware of the traction robbing nature of pressure variation at the rear contact patch but fails to weigh up the full significance of that insight for the climbing context. Additionally, when riding up a hill on a surface that offers good traction it is in fact the higher anti-squat bikes that will have a greater tendency to lift the front wheel. Why? Not losing any energy into squat the higher anti-squat bikes will offer greater acceleration potential and as acceleration is what lifts the front wheel of the bike that will be something that the high anti-squat bikes are more prone to.
None of this means that 100% AS bikes will offer a poor climbing experience. There will be very little suspension bob and that is a big gain. Furthermore, human beings have limited strength so we do not only need bikes offering good climbing traction but also efficient climbing. A bike should get a rider up a hill without exhausting them due to energy being lost into squatting of the suspension. Riders want forward motion not squat. Additionally, most human being are unwilling to devote more time than is necessary to making their way up a hill. A bobbing mess that seems to want to prolong your climbing suffering is experienced as a undeserved punishment by many riders. And, as it happens, squat is only one way of improving traction and not a very good way. Traction is also improved by better tyre compounds and design. A good selection of gears to deal with different riding scenarios is also a great help to balance traction and efficiency.
From the article above:
"As most of us live on Earth, we are subject to gravity accelerating our mass towards the center of the Earth. This accelerating of our mass exerts a force on the ground where we contact it. This is our weight, measured in Newtons."
Except that the science is currently suggesting gravity is not a force. For non bike-related nerding check out this video explaining that in 'easier' words.
youtu.be/XRr1kaXKBsU
His video about how bikes actually work is also worth watching.
Hell, they pretty much all are worth watching.
Go back to 2*11 drives with only small difference in chainring size, let’s say 30 and 34 teeth. This should give slightly higher AS for accessing and the big ring lower kickback for cruising or downhill.
Was the trend to 1by drives missing this advantage of 2by drive trains?
polebicycles.com/what-is-anti-squat-and-pedal-kickback
For example, motorcycles all have %100 anti squat when you consider only suspension, because the chain line goes above the pivot of the swingarm. But because the acceleration is significant, and the CG is significantly lower, the applied force acts to create some anti squat on acceleration.
For bicycles, the acceleration forces are much smaller, and the CG is much, much higher, so you are never going to achieve acceleration related anti squat. The only anti squat that matters is pivot related.
Also, one thing that they don't mention is that gear selection affects anti squat as well.
‘ All the gear no idea’ is far too often applicable these days.
b23.tv/av95121174