Behind the Numbers: Yeti SB140

Behind the Numbers is made possible by Creaform Portable 3D Measurement Technologies.
We now come to the final bike in the trail category and a slight, and hopefully welcome, difference in wheel size and suspension system compared to the bikes we’ve already looked at. 27.5” wheels are certainly not dead.
Yeti have always had an alternative take on a suspension system. Sliders and spinning elements have graced their designs for a very long time and the bike we’ll take a look at, the SB140, uses their latest incarnation dubbed Switch Infinity.
While we’ll look at what the SB140 looks like on the graphs, we can also do a bit of explaining on just how the Switch Infinity system works.

Scanning
As you’ve seen, all the bikes in the trail category we looked at have been 3D scanned. But between the actual scanning and output of kinematic graphs there are some important steps in the process that often get forgotten about. A quick thank you again to The Factory Bike shop for letting us borrow one of their highly expensive bikes.
The output of the scan is directly a file format called STL or stereolithography. This is the build-up of all the small triangles to form the surfaces of the bike scan. During the scan and post-treatment we used VXelements, a software from Creaform that works with the scanner hardware and is used for the following alignment, entity extraction and decimation steps.
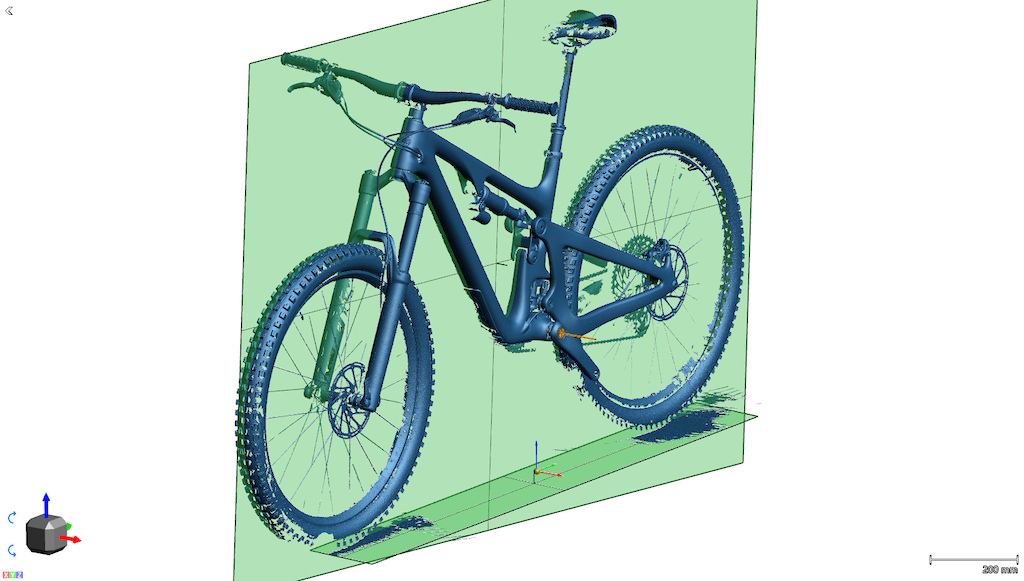
Aligning the scanned bike in space using the center plane, floor and crank axis is the first crucial step. A different alignment can result in different measurements further down the road.
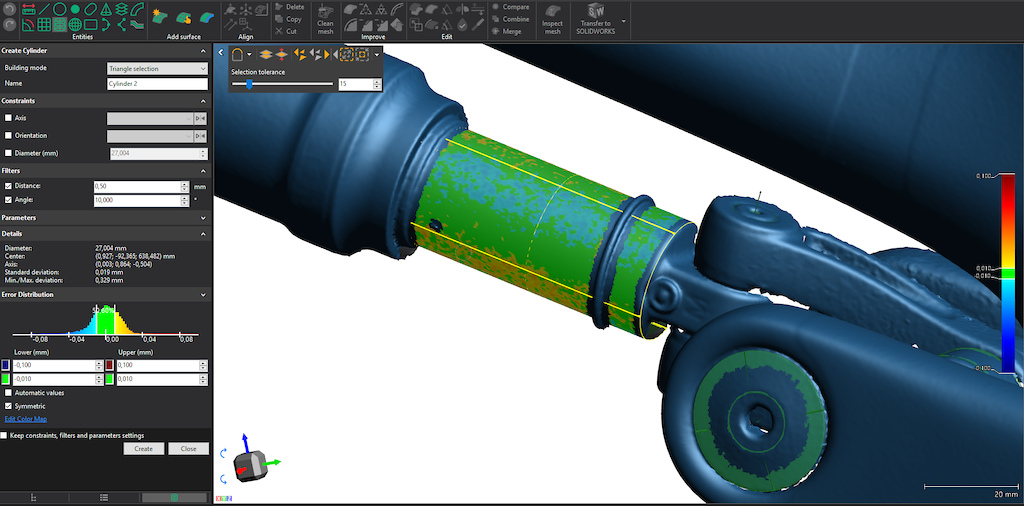
Extracting entities uses the scan data to create clean geometrical entities that can represent parts of the bike scan and easily be used later in the analysis. Here the shock shaft scan area is being turned into a cylindrical entity.
The first crucial step in post-treatment is the alignment. This allows us to extract the dimensions most relevant to the application, in our case the kinematic and geometry points. The alignment uses the middle plane of the bike, the floor and the BB axis to position the bike in space and give us our reference planes. Aligning is crucial as a different alignment can result in different measurements.
After that we extract the entities, where we take surfaces, shapes and features on the scan data and reinterpret them as cleaner entities that are easier to then deal with and take our kinematic from.
Inside the VXelements software is VXmodel, which enables the user to quickly and accurately create all kinds of entities and measurements. The software will automatically select from thousands of points the best fit for the desired geometrical entity, like the shock shaft shown. There are also options to constrain the entities, in their orientation and diameter for example, to help fit them to the scan. The created entities can be coloured to help validate them in comparison to the STL scan file.

The original scan consisted of around 14 million small triangles, which makes it a pretty hefty file for working directly with.
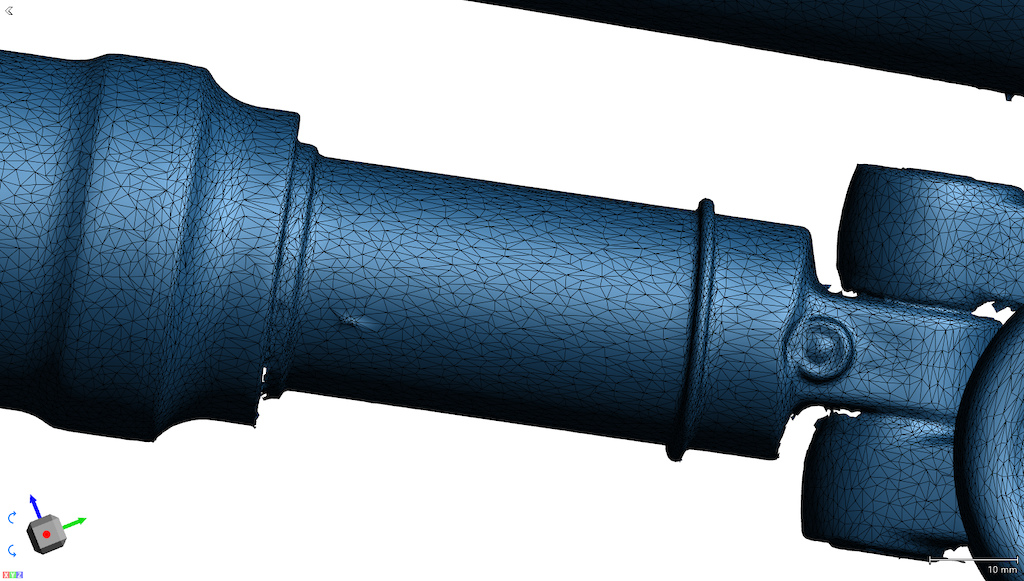
Decimation reduces the number of triangles without disturbing the quality of the scan. It puts the small triangles where the detail lies and uses fewer larger triangles on flatter surfaces. After decimation we were down to around 2.5 million triangles.
With the scan STL file often compromising of millions of triangles, it’s pretty data heavy and can need some processing power or time when opening or working with in other software. Decimation reduces the number of triangles to help reduce the overall file size without altering the quality of the scan. Typically, the number of triangles can be reduced by 75-80% without reducing the quality of the data, as only the small triangles are kept in the places where there is detail. There’s no need for small triangles on flat surfaces.
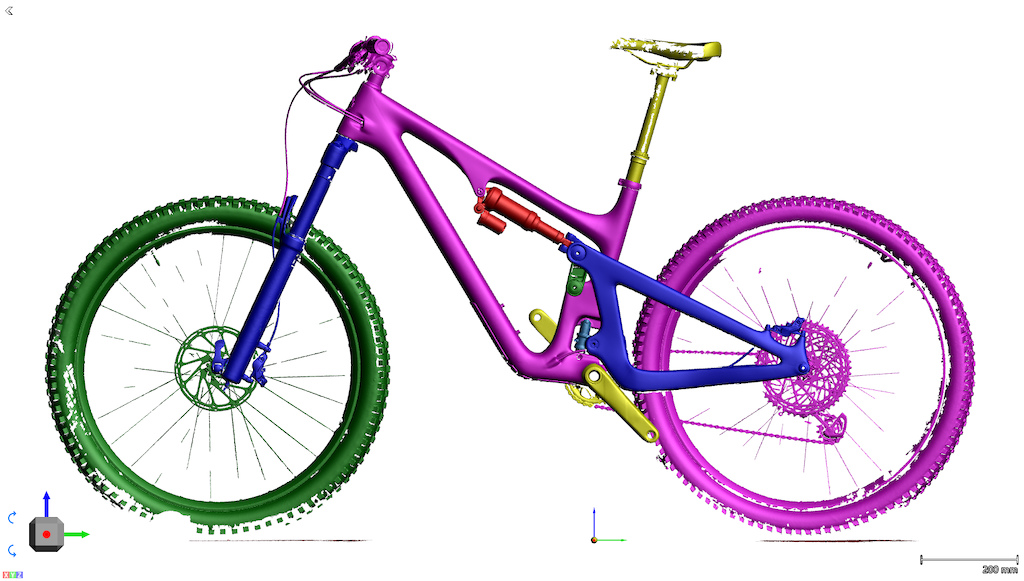
Splitting the bike scan into sections allows to have individual parts that we can then assemble together and move around to animate the bike as it goes through its suspension.
After that, and mainly for your viewing pleasure, the bike scan is also split into sections. This 5-10-minute job per bike allows us to have individual models for the frame and bike parts which we can then tie into the kinematic and animate to show you how the suspension moves and how the characteristics we analyze change throughout the travel.
Once we’ve got our STL files of the full bike scan, the decimated version and the entities we can move over to PTC Creo to begin importing and extracting the kinematic, as well as setting up the model to provide our animations.

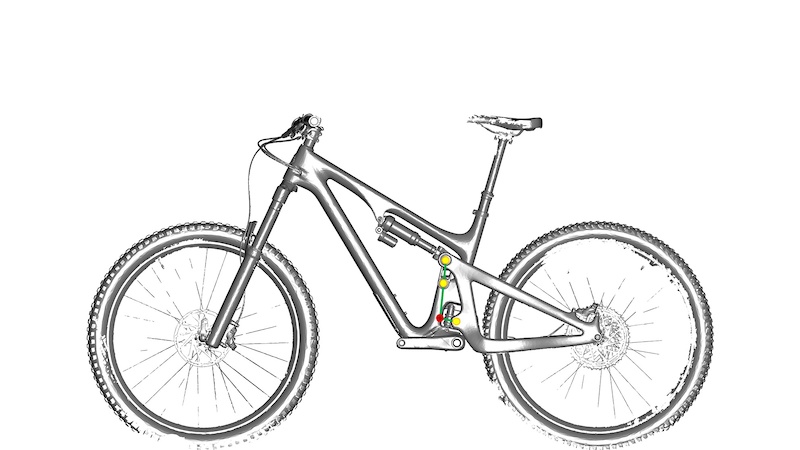
The Yeti SB140 is essentially a four-bar suspension system, but their Switch Infinity design mimics an infinitely long lower link packaged into the space of a smaller link. The instant center, or IC, is depicted here by the engineering standard for showing an instant center - a cat.
The SB140 is a 27.5” wheeled, 140mm travel trail bike with a 160mm travel fork.
Of late, Yeti have split their range into Rip and Race categories, and the SB140 falls into the Rip segment of bikes, intended to have a bit more of a focus on the play aspect of riding rather than the fastest point to point time, which can also be fun sometimes.
As mentioned, Yeti use a system called Switch Infinity. In the same way that the Ibis Ripmo we looked at had a name associated with its suspension system, DW-Link in that case, we can actually look at the Yeti as falling under the same four-bar suspension design.
Of late, Yeti have split their range into Rip and Race categories, and the SB140 falls into the Rip segment of bikes, intended to have a bit more of a focus on the play aspect of riding rather than the fastest point to point time, which can also be fun sometimes.
As mentioned, Yeti use a system called Switch Infinity. In the same way that the Ibis Ripmo we looked at had a name associated with its suspension system, DW-Link in that case, we can actually look at the Yeti as falling under the same four-bar suspension design.
SB140 Analysis Details
Travel Rear: 140.1mm
Travel Front: 160mm
Wheel Size: 27.5"
Frame Size: Medium
CoG Height: 1,100mm
Chainring Size: 30T
Cassette Cog Sizes: 50T, 24T and 10T
Travel Rear: 140.1mm
Travel Front: 160mm
Wheel Size: 27.5"
Frame Size: Medium
CoG Height: 1,100mm
Chainring Size: 30T
Cassette Cog Sizes: 50T, 24T and 10T
Categorising aside, though, there is a major difference between the designs of the Ibis and the Yeti. With the Ibis it’s clear to see the two links that connect the rear triangle to the front and even extrapolate where the instant center lies.
With the Yeti we can see one recognizable link connecting the top of the rear triangle to the main frame, but the other connection is the sliding element down by the bottom bracket.
Now, if we imagine the path a link takes when it rotates around a fixed pivot, it draws an arc. If we were to rotate it completely, we’d have a circle, with the radius of the circle being the link length. If we were to increase that link length our circle would increase in size too. Seeing as the links in bike suspension systems only rotate through a small angle, we can zoom in on that segment. The short link would have a much more pronounced arc to it than the long link, with that looking a lot straighter to our eye.
If we were to keep increasing the link length, longer and longer, that segment would get closer and closer to a straight line. If we were to make the link infinity long then the segment would actually become a straight line, just like the path that the slider takes. And also, hence the Switch Infinity name.
So, what we have is a four-bar design with one short link and one effectively really damn long link.

If we take a short link, like the top link from a Santa Cruz, we can visibly see the arc the link moves through as the bike goes through its travel. If we make the link length longer and longer then the arc becomes straighter and straighter. If you make the link infinitely long, then the arc becomes a straight line, and this is exactly what Yeti have done with their Switch Infinity system. Trying to package a link that long gets tricky, so having it packaged into their small proprietary slider system is a clever trick from a kinematic point of view.
From a kinematic design point of view what Yeti have done is really clever. As we’ve seen so far, shorter linked bikes generally tend to create suspension curves with a bit more of a wild shape to them. Compare the curve shapes of the long-linked Norco Sight to the short-linked Ibis Ripmo and you’ll see. The Switch Infinity system then endeavours to have the effect of a really long linked bike but packaged into a small space. Trying to fit a meter-long link, let alone one infinitely long, into a bike would be impossible. Especially if you want a water bottle in there too.
Analyzing the Yeti can be done by substituting the slider mechanism for a very long link, to replicate that straight path of the slider, or analyzed with the link an infinitely long link to make sure the kinematic analysis is bang on.
On the SB140 the slider moves 4.9mm up from its starting position and then moves all the way back down to 0.9mm lower than where it started.
Moving more into the real world, though, the slider mechanism, with its pivot for the rear triangle, doesn’t take up too much space but does present its own challenges to manufacture and fix into the bike. There have been some reports of noisy Switch Infinity systems with the added connections between the front and rear triangle leading to a few more opportunities for creaks and squeaks.
Another packaging point with the Yeti comes when that water bottle clearance is added in. It’s always good to have your bottle out of the firing line of muck and so putting it inside the front triangle makes sense. With Yeti also having to make space for their Switch Infinity system this means the bike can have a bit of a pregnant look to it, with the down tube bend sticking out almost as much as the cranks.
0% Loaded
1/21
The instant center moves around in space as the links that define it move with the rear wheel. The yellow dots represent the pivots of the bike and the red the IC.
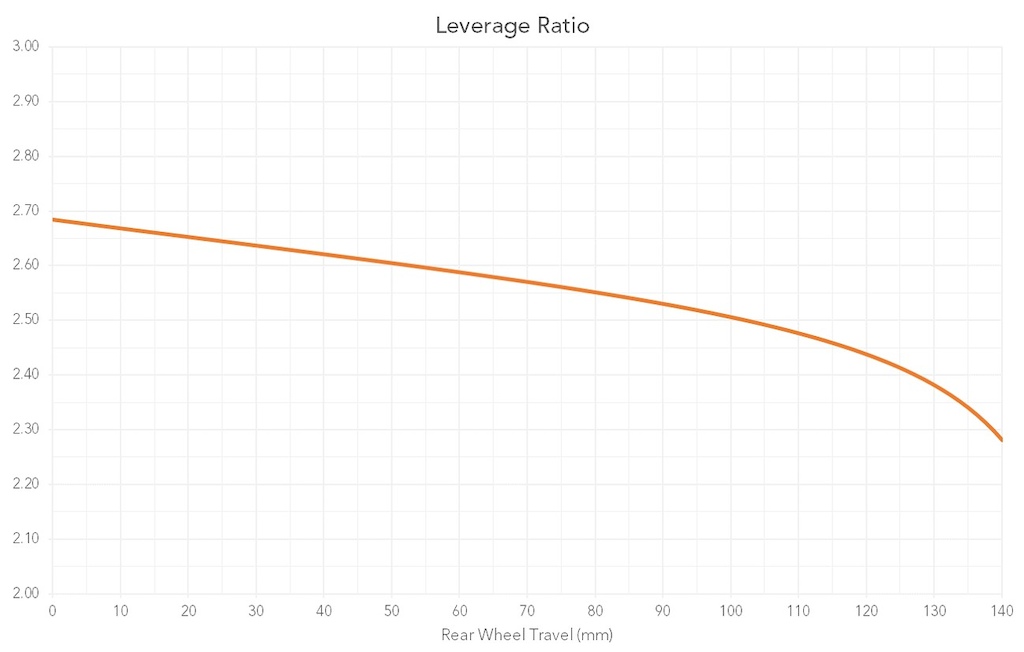
Leverage Ratio
The SB140 has 15.1% progression with a constantly decreasing leverage ratio. It starts at 2.68 and finishes at 2.28. Over the whole range the average leverage ratio is 2.55.
The SB140 uses a 210 x 55mm shock and uses the Fox DPX2 as standard. There is a very good online shock setup guide that takes your weight, model and kit and outputs suggested pressures for the fork, shock and tires as well as suggested damper settings that should have you in a good starting point.
As is the case with the Ibis, it uses standard eyelets at either end and a really small shock extender to bridge the gap from the link to the shock. Yeti did another clever deign point, with the split extender using the same piece twice just flipped upside down.
The leverage ratio curve is about as straight a line as you can get from zero travel to around half way, after which there is a sharper drop in the leverage ratios. Despite the lower “link” being really long, the upper link still rotates quite a bit and does produce this flick in the curve at the end of travel.
When this is combined with a shock full of volume spacers it could pose the problem of running into a wall of progression rather than running into the end of travel. In extreme cases that wall can often feel like a bottom out despite you not actually getting to full travel.
But perhaps Yeti intended this difference between the start and end of travel, with the bike having a slightly more linear feel for the majority of travel with a good chunk of mechanical ramp for those times when you really get down to the end of travel. With Yeti suggesting slightly more sag, at 33% shock stroke, then this could well be the case and the bike did come with zero volume spacers in the shock.
The SB140 does have a good amount of progression, but a lot of that comes in the second half of travel where the ratio drops off faster. Extrapolating the very straight first half out to the end of travel would only yield around 8-9% progression, so that end drop is doing a lot of the heavy lifting.
Overall, the leverage ratios are low when comparing to the other bikes we’ve looked at with only the Unno having a lower average. Those lower leverage ratios move the shock shaft faster, and create more damping from the increased shaft speeds, when compared to a more highly leveraged ratio bike. Damping force is dependent on speed, with only a few suspension manufacturers including position sensitive elements that often work in conjunction with the naturally speed sensitive elements.
Sarah Moore reviewed the SB140 back in May and commented on its stability and control. With a bike being the sum of its parts some of that has to be contributed to the geometry. Although, to the annoyance of my bosses, geometry is not the be all and end all. The Yeti starts with good static geometry at sag but also benefits from having that good geometry continue to shine when the bike is dynamic. The overall progressive and straight leverage ratio curve and low ratios bringing predictability and support that keep you closer to that well-designed geometry that Yeti intended, rather than always riding too high or too low in the travel.
Sarah also commented that the bike didn’t blow through its travel too easily, again due to the lower leverage ratios offering a bit more hydraulic support overall, but also due to that second half of travel having ever increasing ramp up.
Higher speed, more man-made trails were said to yield better performance from the bike than slow speed technical ones. Perhaps due again to the amount of damping the bike generates but also possible down to the smaller wheels. Nevertheless, riding the bike in Whistler Bike Park sounded like a hoot and is testament to the capabilities of this trail bike.
At 33% shock shaft sag there is 34.3% rear wheel travel on the Yeti.

Anti-Squat
The SB140 comes specced with a 30T chainring, and by this point it might be a little easier for us to compare apples to oranges and bikes with different sized chainrings. We analysed the bike with the 30T ring to keep it true to what the bike is available with and the feedback from out on the trails.
Remember that if you were to up the chainring size you would drop the amount of anti-squat. Moving up to a 32T chain ring would drop the curves down by around 4% in the 50T cog, 8% in the 24T cog and 19% in the 10T cog.
The same curve shape found in the leverage ratio is also found in the anti-squat, with fairly constant percentages in the first half of travel and a drop off at the end. But in all gears the bike has more than 100% anti-squat at 33% shock sag.
The 50T gear actually has the lowest anti-squat of the whole cassette but is still at 109%. Going into harder gears the percentage increases to 123% in the 24T cog and 160% in the 10T cog. So, in all the gear associated with pedalling there is more than enough countering of the effects of load transfer and even enough left over to combat the other forces attempting to compress the suspension when pedalling. 100% might be seen by some as the magical number on paper, but in the real world often higher percentage yield better results and less reliance on the shock to add support when pedalling.
There is of course an upper limit too, where the forces would cause real world rise in the suspension when accelerating. But Yeti keep their percentages in a good range for the pedalling gears and this gives the SB140 the firm pedalling feeling that Sarah commented on in her review. On only the biggest slogs of road climbs did she need to use the lockout lever due to these high anti-squat percentages combined with some inherent support from the leverage ratio around the pedalling window of the bike’s curves.
When we compare to the other bikes we’ve looked at, and we’ll do that in more detail in our comparison article, we can see that as a trend all the bikes now tend to have around or above 100% anti-squat around sag and in their pedalling gears. The SB140 fits this trend nicely.
0% Loaded
1/21
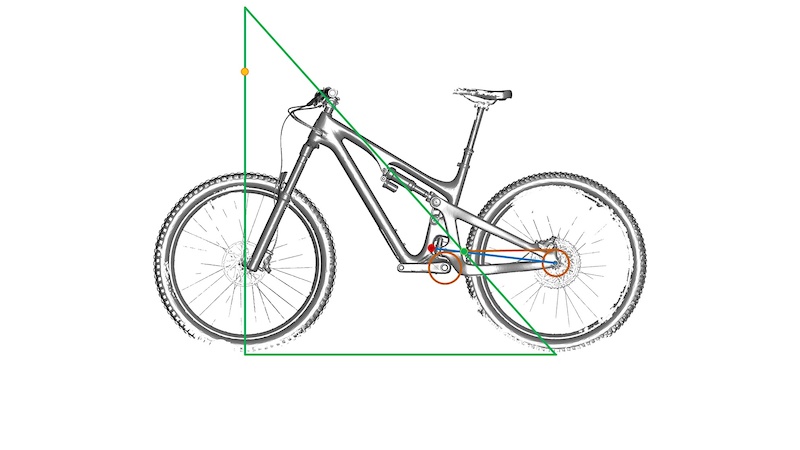
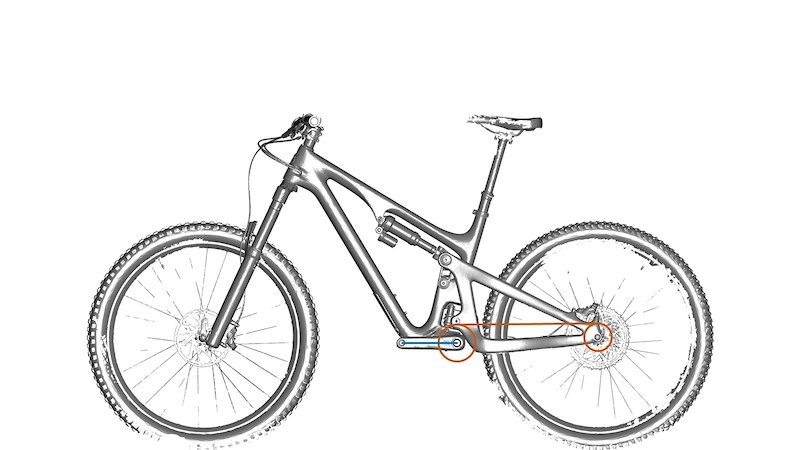
The red IC dot is carried over and creates the blue IC - rear axle line. Intersecting that with the chain line we get the instant center of anti-squat, the green dot. The orange dot represents the 100% anti-squat mark. This is in the 30t chain ring and 24T cassette cog.
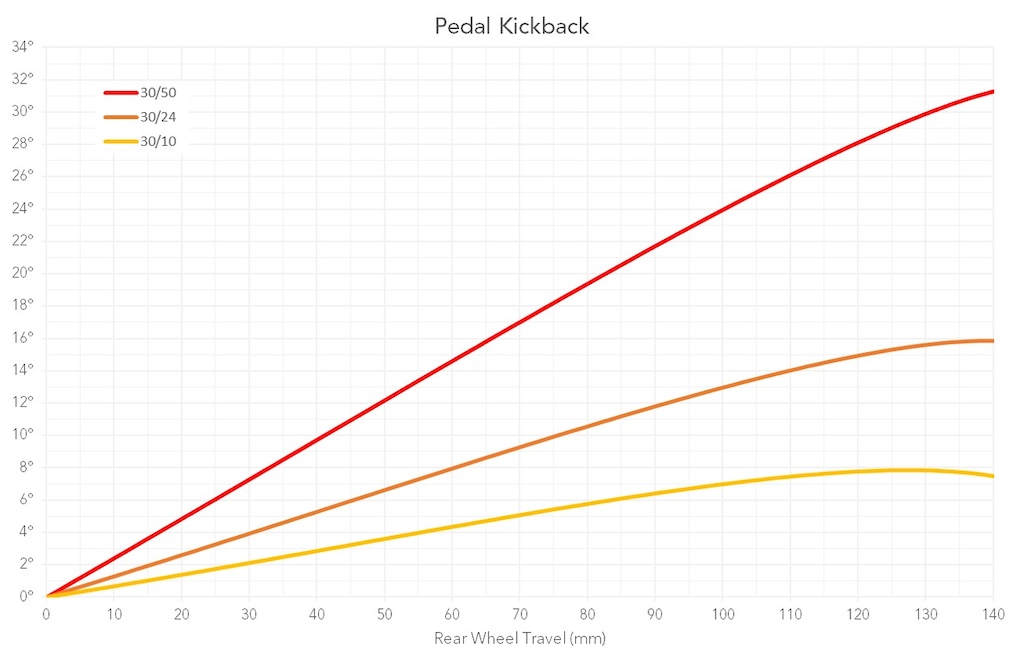
Pedal Kickback
As we know, on bikes without an idler pulley to reroute the chain line we generally have more pedal kickback for bikes with higher anti-squat percentages. Years ago, engineers would focus more on the potential downsides of pedal kickback, looking to have low degrees of it. And as a result, there would be low anti-squat numbers. Over the years the advantages of higher anti-squat have become more of a priority in design.
The Yeti does have the highest ultimate kick back of any of the bikes we’ve looked, at 31.3° with a 32T chain ring and 50T cassette cog.
The same is almost true of the other gears, with them maintaining a higher degree of kickback until the very end of travel, where we once again see a drop off relating to the drop off in anti-squat.
Taking our example of going off a 1m drop that uses 75% of travel and being in the 24T cassette cog, how fast would the Yeti have to be travelling to never encounter the effects of pedal kickback? This example situation is based around a certain rear wheel compression time needed to get to 75% travel and then converting the pedal kickback to a speed at the cassette. As long as the bike travels above this cassette speed then the freehub would never catch up the hub body and pedal kickback couldn’t occur. For the SB140 it would have to be going at 11.7kph or 7.3mph.
Dropping down into the harder gears that critical speed would actually increase, as the drop in pedal kickback is outweighed by the gear ratio change in the 10T cog and you’d have to be going 15.1kph or 9.4mph.
In the 50T cog you could actually go a fraction slower than in the 24T cog, at 10.4kph or 6.5mph to negate the pedal kickback effects. The gear ratio once again having more of an effect on the critical speed than the increase in pedal kickback amount.
0% Loaded
1/21
Remember that pedal kickback is calculated with a fixed rear wheel and only looks at the influence on the crank. When we ride it can be a different matter. The blue line represents the bike at zero travel and the green shows how the cranks rotate backwards as the bike goes through its travel.
Anti-Rise
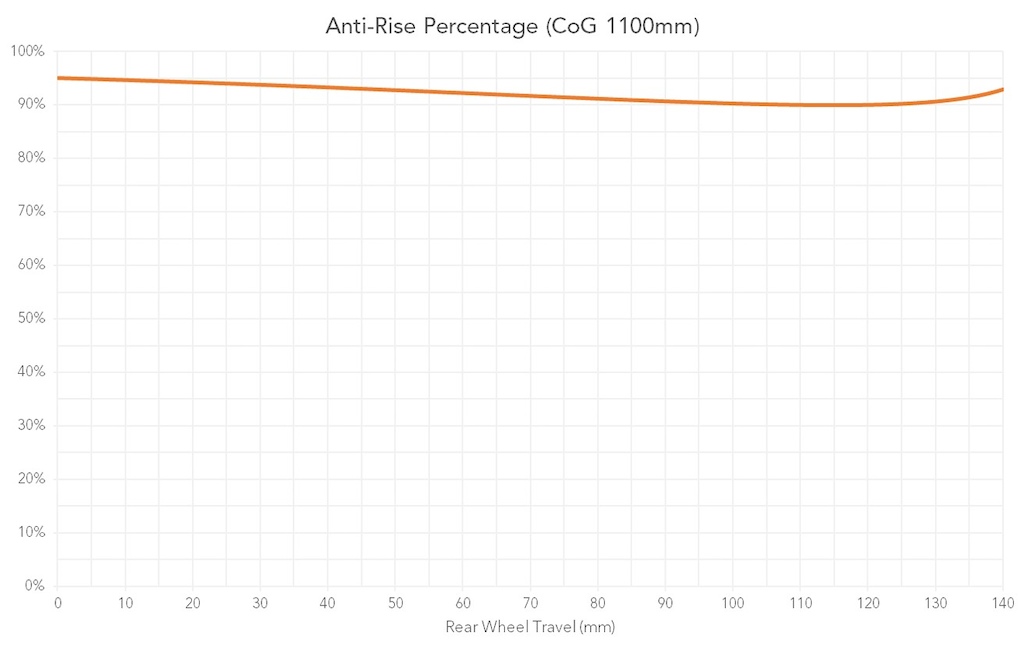
Tying in with the high level of anti-squat, the SB140 also exhibits a high level of anti-rise. So too is the flick towards the end of travel, but in the case of the anti-rise, to much less of a degree.
The anti-rise percentage remains pretty constant between 90-95% throughout the entire travel range, contributing to combating very nearly all the effects of load transfer from rear braking.
Depending on the other bike characteristics and setup, high levels of anti-rise can sometimes manifest themselves in a bit of harshness. In the case of the SB140, with its higher pedal kickback values too, this could well be contributing to what Sarah described as the bike not feeling quite as composed and supple in slow speed technical descents.
There’s always a balance to strike in all the factors of bike and what the Yeti gains in its incredibly mechanical support under acceleration and deceleration could mean that it’s a little firmer under foot in those situations.
Having never ridden in Colorado, where Yeti are based, it’s hard to comment if their surroundings play a commanding role in the style of bikes they develop. While high anti-rise isn’t necessarily a bad thing, Sarah comments that the SB140 did benefit more from being off the brakes and on the fast and open trails that she rode in Whistler, rather than the slow speed tech surrounding Squamish. It’s good to note that anti-rise doesn’t solely describe how a bike will brake. Instead it’s one part of the equation in explaining it.
0% Loaded
1/21
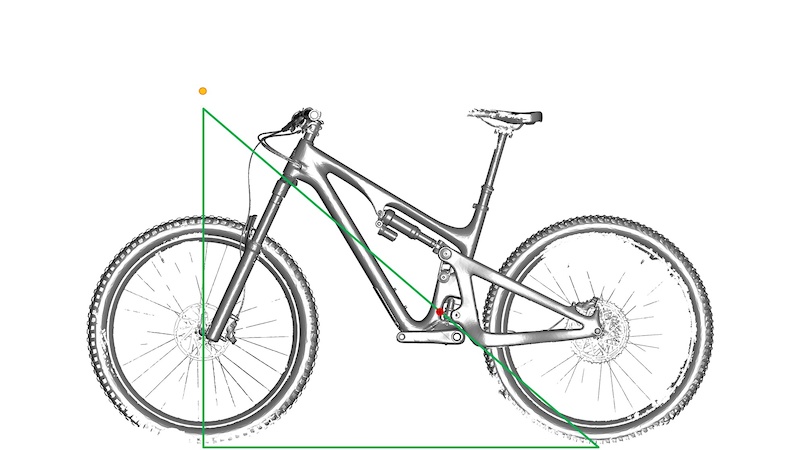
It's only the red IC dot we need to calculate anti-rise. The orange one again represents the 100% anti-rise mark.
Axle Path
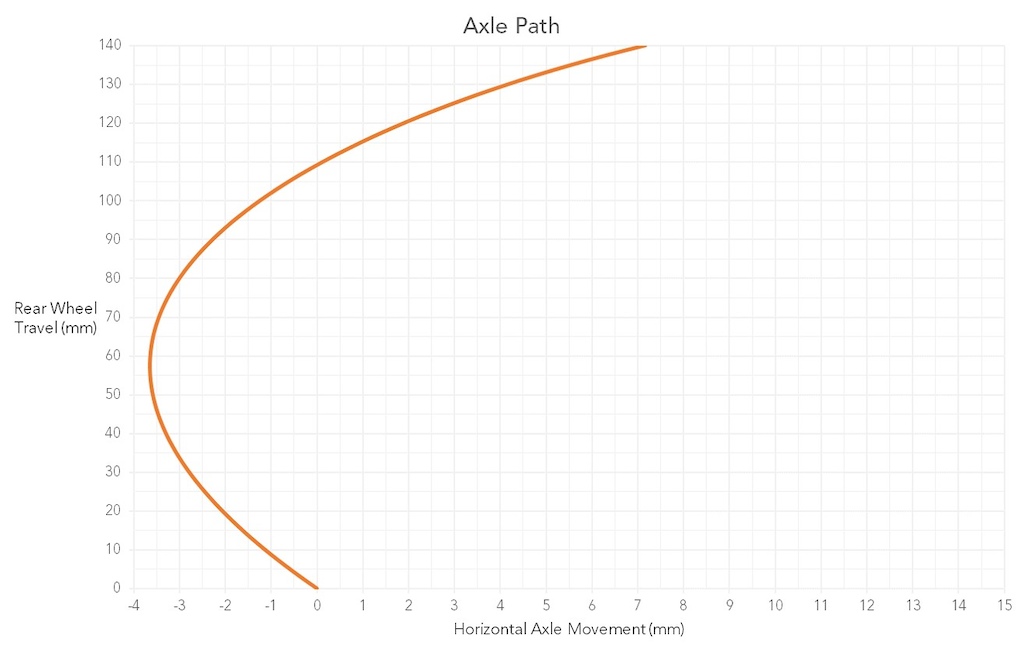
The Yeti takes the most rearward axle path of all the bikes we’ve looked at with 3.6mm of rearward movement before moving 10.8mm forwards. The Yeti also moves the most rearward over the biggest travel amount, with it seeing it most rearward point at 39% shock stroke. Meaning that from your sag point you would actually have a fraction of rearward movement when encountering an impact before the axle would then want to move forwards.
It could be construed that the seemingly minute differences in axle path are insignificant. But even on bikes as long as you find from some of the extreme manufactures, they’re a study into fractions of millimeters and seemingly subtle changes can come together with other seemingly subtle movements to create something perceivable.
While yes, you might see a far more significant change comparing the Yeti to a high pivot Forbidden Druid the devil still lies in the details.
Assumptions in Analysis
All of the trail bikes that Behind the Numbers have looked at have been size mediums, and so we adjust our center of gravity (CoG) height to 1,100mm above the ground.
It’s good to remember that the analyses for anti-squat and anti-rise always assume a static CoG. In the real world, this is rarely the case, but needs to be done for analysis’ sake to allow it to be easily calculated and then compared to other designs and bikes. Once we have our analysis it’s then easy to add back in the real-world elements that are relevant to each of us and where we ride our bikes. For more chin-scratching about that, check out the Enginerding article on anti-squat.
There’s no industry standard for the fork in anti-squat and anti-rise analysis. We can either fix the fork travel to generate a single curve or we can adjust the fork travel as we go through the rear travel to create a window. For these analyses, we leave the fork at fixed at full travel. Again, as long as these assumptions about anti-squat and anti-rise are known and understood, it’s easier to analyze and compare bikes.
Final Thoughts
 | The SB140 is described as lots of fun, and some of you may solely attribute that to smaller wheels. While they do play a part, the bike shows us that predictability in suspension and efficiency in dealing with acceleration and deceleration help that too. High levels of anti-squat and anti-rise keep the bike from, well, squatting and rising when you pedal forwards or brake. But in the case of the braking, and combined with the increased chain growth, it was a little harsher than some of the other bikes we’ve looked at in slower speed technical sections. The SB140, along with Yeti’s take on a four-bar suspension system, keeps the world of mountain bike design interesting and diverse while not just doing it for diversity’s sake. |
Author Info:

 Member since Apr 6, 2019
Member since Apr 6, 2019
Must Read This Week
Sign Up for the Pinkbike Newsletter - All the Biggest, Most Interesting Stories in your Inbox
PB Newsletter Signup
But the cat IS cute ...
- Antisquat = how much the pedalling force compresses/extends suspension: >= 100% good, 100% - bad
- Antirise = how much the braking force compresses/extends the suspension: 100% rear wheel gets traction but bike gets steeper , 100% neutral, > 100% bike gest slacker but rear wheel looses traction.
- Kickback = how much your crank would rotate when compressing the suspension when bike does not move. When rear wheel rotates faster than your crank rotates due to kickback is is effectively cancelled.
Antisquat - fully sik pedalling
Leverage Ratio - fully sik suspension effect
Anti-Rise - fully sick hunkered braking
Progression- fully sick shock action!
I think that might be easier to understand?
137 Dentists
180 Yeti's (can't have just one)
98 faulty triangles
2,000,000 PB trolls
Last summer on the BCBR I sat with a dentist at dinner who was riding a Yeti, and when I said something mild, like, “A dentist on a dentist bike!” He looked at me like I’d just kicked his puppy.
Then more recently I was giving one of my former classmates who’s now a dentist a hard time about how he should only be allowed to wear Rapha kit with his Cervelo, and he didn’t appreciate it at all.
Am I just running into dentists with poor senses of humor, or is it really offensive to tooth repair professionals to point out that they have nice bikes?
Much much higher likelihood of finding a humorous cardiothoracic surgeon!
but got some jokes about my Nicolai’s, as engineer bikes with deretisimas and bels/whistles.
and yeas I am engineer, i like it.
I just hate when people pointing on pinon asking where is battery on my emoped
When people asking about price honestly answering +- 1-5 overage monthly salary.
but its depends on what position and where you working
www.pinkbike.com/news/Myles-Rockwell-Bike-Check-Yeti-ARC-DH-2012.html
This is all speculation though as I am not a suspension engineer.
Specialized FSR, as I understand it, is simply a long-link four-bar (i.e. Horst linkage) system so it would likely be somewhat different, depending on how much the other three exploit the greater ability of their systems to tune the anti-squat, anti-rise and leverage curves.
Disclaimer: Also not a suspension engineer...
Co-rotating links move the IC rearwards through the travel, counter-rotating links move it forward.
Having different suspension systems on bikes with the same geometry and same for example anti-squat at the sag point will still give different characteristics through the travel due to link lengths and location. Even more, the same suspension layout with different details can give different results. Even with the same static geometry and for example antisquat at sag.
As for short link vs. long link, switch infinity is packaged as a dual short link (if you squint...), but it acts, kinematically, as a bike with an infinitely long link. But as above, it's what you do with that long link that matters. So how it's oriented (rotate it forwards and the IC will be under the ground for example) and how the other link is oriented.
I'm trying to find a used round ring to test for comparison (don't really want to spend cash on one since I still really enjoy the ride on the oval ring) and trying to think of ways to zip-strip on a little jig to the shock so I can see if the bob is pulling the shock above the set sag point or down below it.
It is interesting that the antisquat changes throughout each pedal stroke when using an oval chainring. A general article or video on that would be very interesting.
additionally, what is the hope with anti-rise? are we hoping to have a bike that extends during braking so that more travel is available in case of hitting a bump or landing off of a drop? or is something else the 'ideal' result of properly engineered anti-rise?
What these articles don’t really take into account is rider height and weight. A 65kg/1.75m rider is going to have a vastly different experience (and requirement) of suspension kinematics (and sizing, tire casing, suspension damping, wheel and frame stiffness etc) than a 95kg/2.10m rider.
Do you know why the assumption is that only rear braking affects anti-rise characteristics? it seems to me that grabbing a fingerload of front brake will cause some deceleration forces to act on the rear suspension of the bike as well. Also, does low anti-rise automatically mean that there is a loss of traction/sensitivity of the rear end? If so, what's happening there? I don't think we experience the same thing with our forks, do we?
However, combined with the high rise/squat characteristics, the squat portion of the rear suspension travel is at a higher spring preload adding further to the effect. You can train yourself to not brake is areas where suspension sensitivity is required but IME, in real world use that isn’t always possible. Especially riding blind or during a race. It also asks more of the tire, meaning that you may have to run a heavier casing tire on the rear to compensate for the reduced travel while braking.
All IMO.
Is there an ideal AS number and does the ideal AS change depending on what speed you are riding and/ or terrain, which determines what gear you are in anyways?
Also, it's not the fact that a given chainring is oval or not, it's the diameter/radius. For round chainrings it's obvious, but for ovals you need the somewhat "virtual" radius at the point where the biggest pedal force occurs. Which is right about at it's biggest diameter.
So for a good rule of thumb: An oval chainring with 32t should bring similar AS as a 34t round one, since a 32t oval has about the same radius at the critical point as a 34t round one always has.
To your example: The 30t oval pulled the chain from a higher point than your new 30t round chainring, which most likely resulted in less directional force against the squatting movement of the bike.
I hope I didn't mess up circumference/diameter/radius, I'm kinda tired and not so fond of the English lingo.
when my son and I do epic George Washington National forest rides that include long steep ascents, long steep and knarly descents. The faster I go the better it feels, I call it my Colorado Sherman Tank cause that's where it feels like it belongs.
Would like to know, not that I am going to buy one any time soon, but do own a 66 front end that may build a back end for!
Also would like to know if high anti squat would be good for pedal kicks?
- a circle has a static centre; wherever you measure the radius on the circle it is the same and has the same centre, whereas with an ellipse, the centre of the (changing) radius moves around (along the wide axis of the ellipse).
I never got why they worked the IC the way they did, and now seeing the yeti IC red dot move in the way they suggest and I have to call it out...
Each point has his own centre of curvature, but all points of a rigid body share the same IC. IC "move" more than CC.
CC gives information about trajectory, but IC gives informations about dynamics (speed field, forces, ...)
That’s a fair point but why use IC and not CC if CC is a better tool for comparing suspension?
Quote Dave Weagle:
_dw said:
07-15-2009
CC is the moving focus of the axle path curvature. IC is the rectified force center of the linkage system. Because the axle path is always perpendicular to the driving force vector, IC and CC both lie on the driving force vector. You need to know IC to determine anti-squat, but if you want to compare suspensions, CC is a much more useful parameter.
dw★link
Split Pivot
@daveweagle -Twitter
Why would you have that many spacers in it? A curve like that simply doesn't need a super small volume air spring to prevent harsh bottoming, thus won't need much in the way of spacers. What's the first solution to "not using all the travel"? Remove spacers!
sb140 just proving what my 5-year-old carbine 29 is still good enough with it 160/140-125 AM/downcountry geo
Cool articles, thanks
www.youtube.com/watch?v=JYJxK1Dr_2s
but its depends on what position and where you working